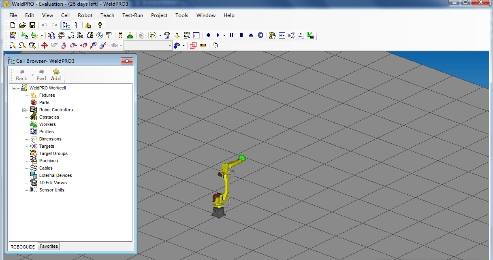
发那科机器人下载-发那科机器人仿真软件 v9.3免费版下载
发那科机器人仿真软件是一款超强的机器人仿真工具!发那科机器人仿真软件功能强大,知识兔使用它来完成机器人的开发;还可以在电脑上进行虚拟操作,非常的好用,快速的提升效率。有了它知识兔么不用像以往一样需要自己不断的时间操作去进行开发,操作人员可以对机械运作程序进行编写,实现最快效率的生产办公模式。对知识兔这款机器人仿真软件感兴趣的用户不要错过了哦!

使用方法
1、知识兔双击Setup.exe,知识兔选择程序安装目录、组件,安装软件
FANUC Roboguide V9 (rev.H)
2、软件安装完成后,复制frlicensechecker.dll到软件安装目录下Shared\Utilities替换原文件
默认路径C:\Program Files (x86)\FANUC\Shared\Utilities
替换文件
3、安装激活完成,知识兔打开软件使用即可。
发那科机器人仿真软件功能
【工作单元库】
基本CAD模型的CAD库
能够将自己的图像添加到库中
【创建多组和多轴机床】
轻松创建由机器人控制器电机驱动的机器。电机可以是扩展轴或多组定义的控制器配置。
【程序教学】
创建基本的TPP程序
通过慢跑机器人,手动输入或单击单元格中的对象来教导TPP位置。
支持MHPICK和PLACE位置的自动示教。
运动陈述,等待陈述支持。
单个正在运行的程序支持。稍后支持多个正在运行的程序。
打开/关闭手视图设置
打开/关闭手指令,使工作单元拾取和放置应用程序具有动画效果。
从CAD生成程序:在CAD文件中查找实体,并使用这些实体自动生成机器人程序。此功能可以大大减少编程时间。
【支持UTOOLS】
将工具图形附加到机器人上以进行打开和关闭成像。
定义UTOOL值。
【支持UFRAMES】
将UFRAMES与工作单元对象相关联。
相对于UFRAMES进行教学。允许移动带有零件/夹具的示教位置以检查范围。
快速将示教参考系从世界坐标更改为UFRAME坐标系。
发那科机器人仿真软件特色
具有图形化UIF组件的完全集成的环境可简化机器人单元的教学过程。
流程浏览器。
广泛的工作单元教程
有关如何操作软件的过程的广泛帮助。
示例工作单元
完整的3D世界环境:具有缩放,平移和旋转功能。
机器人慢跑:手臂拖放教学工具和传统的教学吊坠式慢跑结束。
单个机器人工作单元:支持多个机器人。
发那科机器人仿真软件怎么变中文
1.按下MENU菜单键,知识兔选择6setup (设置),右移光标选择GENERAL (通用),enter回车确认。
2.选择第二项 current language 当前语言
3,按下F4 (choice) , CHINESE按下enter回车确认即可
关于发那科机器人仿真软件相关信息就给大家介绍到这里,希望可以帮到大家!
下载仅供下载体验和测试学习,不得商用和正当使用。



![Autodesk Autocad Mechanical 2020解版64位下载(附注册机)[百度网盘资源]](https://www.xue51.com/uppic/190330/201903301732447019.jpg)

![威力导演(Cyberlink PowerDirector)15注册机破解补丁下载[百度网盘资源]](https://www.xue51.com/uppic/180704/201807041738413111.jpg)